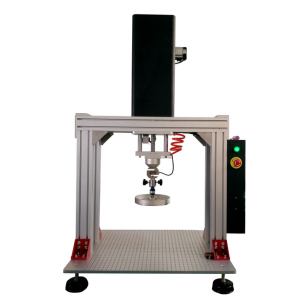
LT -LLN01-BS Servo системаи ягонаи мизи навъи мошини озмоиши tensile
Параметрҳои техникӣ
| 1. Интихоби иқтидор: | 10кг, 20кг, 50кг, 100кг, 200кг, 500кг |
| 2. Ивазкунии агрегат | хама гуна вохидхои байналхалкиро худсарона иваз кардан мумкин аст |
| 3. Дараҷаи рефакторизатсияи сарборӣ: | 1/10,000, сатҳи дақиқ 0,5 |
| 4. Аниқии боркунӣ | ±0,5% |
| 5. Зарари ҳадди аксар: | 600мм |
| 7. Паҳнои самаранок | номаҳдуд |
| 8. Диапазони назорати суръат: | 0,001 ~ 500мм/дақ |
| 9. Дақиқии суръат: | ±0,5% |
| 10.Дараҷаи тақсимшавӣ: | 0,001мм |
| 11. Мотор: | Pмотор servo anasonic, Ҷопон |
| 12.Ҳаҷм: | тақрибан 500 * 470 * 1280мм |
| 13.Вазн: | тақрибан. 75 кг (муҳаррики асосӣ) |
| 14.Таъмини нерӯ: | 1 сим, AC220V, 15A |
| 15.Маводҳои санҷишӣ: | кашиш, кандашавӣ, пӯст кардан ва дигар озмоишҳои харобиовари механикӣ. Нармафзори компютерӣ натиҷаҳоро ба таври худкор ҳисоб мекунад ва каҷҳоро нишон медиҳад. |
| 16.Усули интиқоли маълумот: | Интиқоли RS232 |
| 17.Дастгоҳи бехатарӣ: | дастгоҳи қатъи изтирории изофабор, дастгоҳи лимити зарбаи боло ва поён, ихроҷи автоматии хомӯш кардани барқ, функсияи қатъи нуқтаи худкори. |
| 18.Ҳолати намоиш: | UTM107+ нармафзори озмоишии win-xp Намоиши экрани оддии фишанги якум ва дақиқи пурраи ҳафт фишанги қувваи хаттии системаи ислоҳи дугона Нармафзори интерфейси озмоишии боҳашамат метавонад ба суръат, тағирёбии мавқеъ, режими назорати сарборӣ ва инчунин режими назорати бисёртартибӣ ноил шавад. талабот. |
| 19.Системаи нармафзор | системаи универсалии дақиқи баланд, ки мустақилона аз ҷониби Лето таҳия шудааст |
| 20.Дастгирии сутуни дукарата | маводи хӯлаи пешрафтаи алюминий |
| |
| Ба стандарт мувофиқат кунед | |
| Мувофиқи GB 13022, GB 8808, GB 1040, GB 4850, GB 7753, GB 7754, GB 453, GB/T 17200, GB/T 16578, GB/T 7122, GB/T 2790, GB/T 2791, GB/T T 2792, GB/T 17590, ISO 37, JIS P8113, QB/T 2358, QB/T 1130, ASTM D5748, ASTM D638, ASTM D5748D882 ва дигар талаботи стандартҳои марбут. | |