LT - JJN01 කාර්යාල පුටු පාද පීඩන පරීක්ෂණ යන්ත්රය
තාක්ෂණික පරාමිතීන්
| 1. උපරිම ආතති බර | 2000KG, 5000KG විකල්ප |
| 2. විභේදනය: | 1/100,000, නිරවද්යතා මට්ටම 0.5 |
| 3. ඒකක මාරු කිරීම | සියලුම ජාත්යන්තර පොදු ඒකක අත්තනෝමතික ලෙස මාරු කළ හැකිය |
| 4. ආතති පීඩනයේ නිරවද්ය පරාසය | ± 1/10000 |
| 5. පරීක්ෂණ වේගය | 0.001 ~ 500mm/min |
| 6. විස්ථාපන වියෝජන උපාධිය | 0.001 මි.මී |
| 7. ප්රමාණය | 1360× 960× 1760, ඉහළ සහ පහළ ඵලදායී අවකාශය 800mm |
| 8. බර | 530kg පමණ |
| 9. බල සැපයුම | 1§,220V,15A |
| 10. මෝටර් | පැනසොනික් සර්වෝ මෝටරය |
| 11.ආරක්ෂක උපාංගය | ඉහළ සහ පහළ ආඝාත පාලන ස්විචය, වැඩසටහන උපරිම බර, උපරිම දිගුව, ස්වයංක්රීය නැවතුම් හදිසි ස්විචය සකසයි, ඩ්රයිව් මෝටරය සර්වෝ මෝටරයක් වන අතර එය පරිගණකයේ වේගය සහ ගමන් මගින් සම්පූර්ණයෙන්ම පාලනය වේ |
| නිෂ්පාදන විශේෂාංග | |
| 1. සර්වෝ මෝටර් පාලනය ප්ලාස්ටික් විරූපණය යටතේ පුටු පාදයේ නිරන්තර පීඩනය පවත්වා ගත හැක. | |
| 2. බ්රේක්පොයින්ට්හි ස්වයංක්රීය නැවතුම. | |
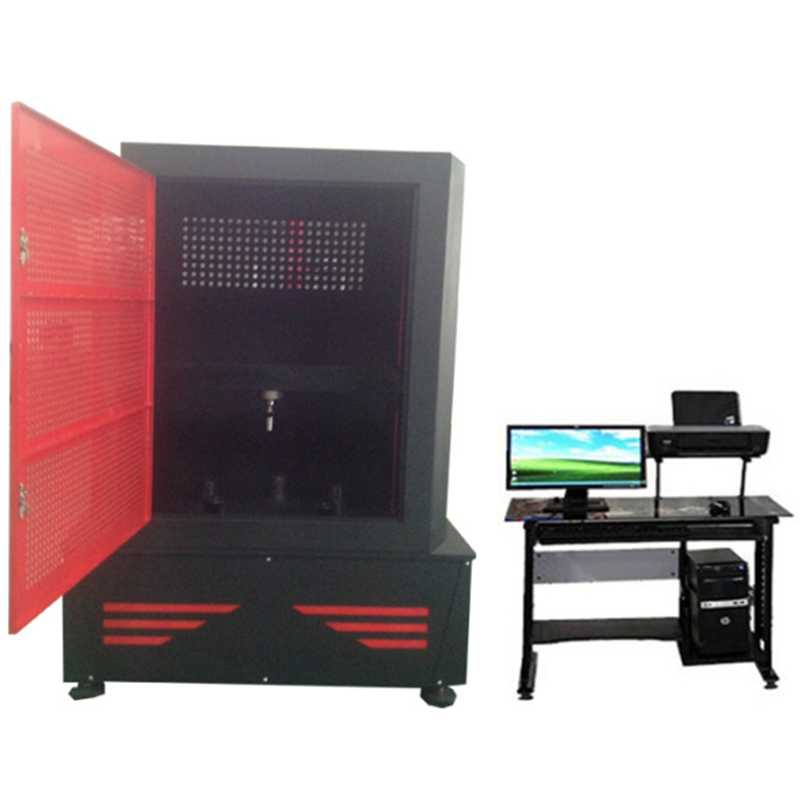
| 3. සම්පූර්ණයෙන්ම පරිගණකගත ස්වයංක්රීය ක්රියාකාරිත්වය, පාරිභෝගිකයාට පරීක්ෂණ වැඩසටහන ලිවිය හැකිය; පරිගණකය ස්වයංක්රීයව ජනනය වේ: බලය - කාල බලය - විස්ථාපන වක්රය. | |
| 4. මුද්රණ යන්ත්රයට අමතර xy රෙකෝඩරයක් නොමැතිව පරිගණකය මගින් පෙන්වන ආතති වක්රය මුද්රණය කළ හැක. වැඩසටහන මූසිකය මඟින් පාලනය කිරීමට සහ තිරයේ ආකෘතිය පාලනය කිරීමට WINDOWS යටතේ ක්රියාත්මක කළ හැක. | |
| 5. පැටවීම, ස්ථායී පැටවීම, පරීක්ෂණ යන්ත්රයේ දිගු ආයු කාලය, හොඳ දිගු කාලීන ස්ථාවරත්වය සහ බලශක්ති ඉතිරි කිරීම සඳහා ඉහළ නිරවද්යතාවයකින් යුත් බෝල ඉස්කුරුප්පු ඇණ. | |
| 6. බහු ආරක්ෂණ පියවර. වැනි: සියලු වර්ගවල විදුලි ආරක්ෂණයේ බල සබැඳිය, අධි බරෙහි මෘදුකාංග කොටස, අධි විස්ථාපන ආරක්ෂාව, යාන්ත්රික බල ආරක්ෂණ සීමාව ආරක්ෂා කිරීම. | |
| 7. සරල, විශ්වසනීය සහ බලවත් පරිශීලක අතුරුමුහුණත. | |
| පරීක්ෂණ වැඩසටහන | |
| නිව්ටන් 11120 දක්වා සෙමින් පටවන්න, මිනිත්තු 1 ක් තබා ගන්න, බාන්න; පරීක්ෂණය වාර්තා කිරීම සඳහා එය විනාඩි 1 ක් සඳහා නිව්ටන් 11120 දක්වා සෙමින් පටවා ඇත. | |
| සම්මතයට අනුකූල වේ | |
| QB/T 2280-2016 | BIFMA X5.1-2017 |
| EN 1335:2000 | |